作者:PRATEEK JOSHI
翻译:张若楠
校对:吴金笛
本文长度为2600字,建议阅读10分钟
本文为一个从图像预处理角度入手的无人驾驶车道识别实战项目。
作者序
大约十年前,我瞥见了第一辆自动驾驶汽车,当时google仍在对初代无人车进行测试,而我立刻被这个想法吸引了。诚然,在将这些概念开源给社区之前,我必须等待一段时间,但是这些等待是值得的。
我最近尝试了一些与计算机视觉有关的自动驾驶理念,其中包括车道检测。设想一下,在设计任何自动驾驶汽车时,车道检测都是一个非常核心的技术。我们将基于这段视频搭建车道检测系统:https://youtu.be/sYhZbhT-Smw。很酷对吧?我将使用OpenCV库,通过计算机视觉,引导你进入车道检测和自动驾驶这一领域。当然,在本教程中我们还将讲解Python代码。
对于任何深度学习或计算机视觉新手,请注意--如果你要入门,请查看以下课程及产品。这些资源可以很好的助力你开始计算机视觉之旅:
https://courses.analyticsvidhya.com/courses/fundamentals-of-deep-learning
https://courses.analyticsvidhya.com/courses/computer-vision-using-deep-learning-version2
1. 了解车道检测的概念
2. 问题陈述
3. 什么是帧蒙版(Frame Mask)?
4. 用于车道检测的图像预处理
5. 在Python中使用OpenCV进行车道检测实战
那么什么是车道检测?维基百科是这样定义车道的:“车道是道路(行车道)的一部分,专门用于单行车辆,以控制和引导驾驶员并减少交通冲突。”

Figure 1:https://en.wikipedia.org/wiki/Lane
对此进行正式定义很重要,因为它使我们能够在项目中使用固定的车道定义,这样在构建系统时我们不会产生任何歧义。
如我之前提到的,车道检测是自动驾驶的重要组成部分。它是推动场景理解的最重要的研究主题之一。一旦获得车道位置,车辆将知道要去哪里,并避免驶入其他车道或离开道路的风险。这可以防止驾驶员/驾驶系统偏离行车轨道。
以下是一些随机道路图像(第一行)及其检测到的车道(第二行):
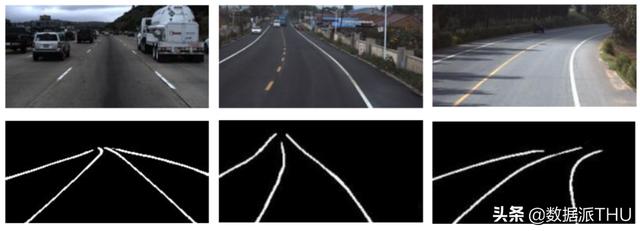
Figure 2 https://github.com/qinnzou/Robust-Lane-Detection
我们希望执行的任务是视频中的实时车道检测。我们可以通过多种方式做车道检测。可以使用样本训练的方法,例如在带有标注的视频数据集上训练深度学习模型,或者使用预先训练好的模型。
但是,也有更简单的方法来执行车道检测。在本文中,我将向你展示如何在不使用任何深度学习模型的情况下做到这一点。我们将在Python中用到广受欢迎的OpenCV库。
以下是我们将要处理的视频中的一帧:

如图片中所示,我们有四条用白色车道标记隔开的车道。因此要检测一条车道,我们必须检测到该车道两侧的白色标记。这就引出了关键问题 -- 我们如何检测车道标记线?
除了车道线外,场景中还有很多其他对象。道路上有车辆,路旁的障碍物,路灯等。在视频中,每一帧的场景都在变化。这很好地反映了现实生活中的驾驶情况。因此,在解决车道检测问题之前,我们必须找到一种方法来忽略驾驶场景中的无关物体。我们可以直接上手的一件事就是缩小关注范围。相较于使用整个帧,我们只使用画面中的一部分。在下图中,除车道标记外,其他所有内容都隐藏在该帧中。随着车辆的移动,车道标记只会在该区域出现得更多或更少。

在下一节,我将向你展示如何编辑视频的边框以选择特定区域。此外你还将了解一些必要的图像预处理操作。
在这里,蒙版不过是一个NumPy数组。当我们想对图像应用遮罩时,我们只需将图像中所需区域的像素值更改为0或255,或任何其他数字。下面给出的是图像遮罩的示例。图像中某个区域的像素值已设置为0:
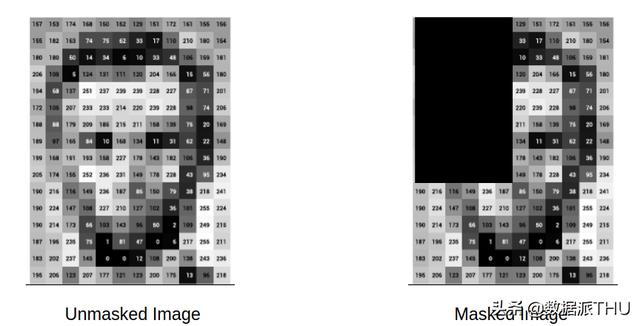
这是一种非常简单但有效的方法,可以从图像中删除不需要的区域和对象。
我们将首先对输入视频中的所有帧应用蒙版。然后,我们将应用图像阈值处理,然后进行霍夫线变换来检测车道标记。
图像阈值处理
在该方法中,我们基于一个阈值,将灰度图像的像素值分配为黑色或者白色。如果像素的值大于阈值,则为其分配一个值(黑色或白色),否则为另一个颜色。
如你在上方所见,在对蒙版图像应用阈值设置后,我们在输出的图像中只留下了车道标记。现在,我们可以借助霍夫线变换轻松地检测到这些标记。
霍夫线变换
霍夫变换是一种检测可以数学表示的形状的技术。
例如,它可以检测矩形,圆形,三角形或直线等形状。而我们关注的对象是可以表示为线的车道标记。我非常建议你查阅霍夫变换的资料:
https://opencvpythontutroals.readthedocs.io/en/latest/py_tutorials/py_imgproc/py_houghlines/py_houghlines.html
在执行图像阈值处理后,在图像上应用霍夫线变换,我们将得到以下的输出图像:

我们需要针对所有帧执行此过程,然后将生成的帧拼接到新视频中。
现在该用Python实现这个车道检测项目了!我建议使用Google Colab,因为构建车道检测系统将需要很大计算力。
首先,导入所需的库:
import osimport reimport cv2import numpy as npfrom tqdm import tqdm_notebookimport matplotlib.pyplot as plt
读取视频帧
我已经从该YouTube视频中采样了一些视频帧。您可以从此链接下载。
https://drive.google.com/file/d/1e4cc4zFFna3Owyym6aq7ZXoquHA2l95O/view
# get file names of framescol_frames = os.listdir('frames/')col_frames.sort(key=lambda f: int(re.sub('D', '', f)))# load framescol_images=[]
让我们绘制其中一帧:
# specify frame indexidx = 457# plot frameplt.figure(figsize=(10,10))plt.imshow(col_images[idx][:,:,0], cmap= "gray")
创建帧蒙版
我们感兴趣的区域是多边形。我们要掩盖除此区域以外的所有内容。因此,我们首先必须指定多边形的坐标,然后使用它来准备蒙版:
# create a zero arraystencil = np.zeros_like(col_images[idx][:,:,0])# specify coordinates of the polygonpolygon = np.array([[50,270], [220,160], [360,160], [480,270]])# fill polygon with onescv2.fillConvexPoly(stencil, polygon, 1)# plot polygonplt.figure(figsize=(10,10))plt.imshow(stencil, cmap= "gray")plt.show()
# Apply polygon as a mask on the frameimg = cv2.bitwise_and(col_images[idx][:,:,0], col_images[idx][:,:,0], mask=stencil)# plot masked frameplt.figure(figsize=(10,10))plt.imshow(img, cmap= "gray")plt.show()
图像预处理
我们必须对视频帧执行几个图像预处理操作,以检测所需的车道。预处理操作为:
1. 图像阈值处理
2. 霍夫线变换
1.图像阈值处理
# get file names of framescol_frames = os.listdir('frames/')col_frames.sort(key=lambda f: int(re.sub('D', '', f)))# load framescol_images=[]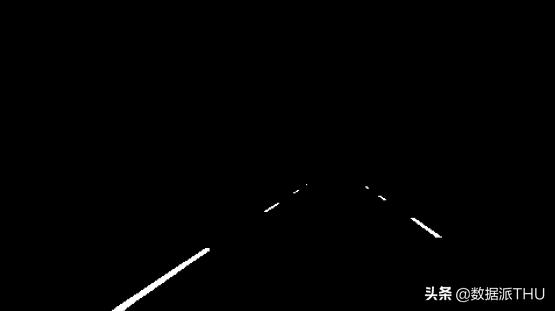
2. 霍夫线变换
lines = cv2.HoughLinesP(thresh, 1, np.pi/180, 30, maxLineGap=200)# create a copy of the original framedmy = col_images[idx][:,:,0].copy()# draw Hough linesfor line in lines: x1, y1, x2, y2 = line[0] cv2.line(dmy, (x1, y1), (x2, y2), (255, 0, 0), 3)# plot frameplt.figure(figsize=(10,10))plt.imshow(dmy, cmap= "gray")plt.show()
现在,我们将所有这些操作应用于每个帧。我们还将结果帧保存在新目录中:
cnt = 0for img in tqdm_notebook(col_images): # apply frame mask masked = cv2.bitwise_and(img[:,:,0], img[:,:,0], mask=stencil) # apply image thresholding ret, thresh = cv2.threshold(masked, 130, 145, cv2.THRESH_BINARY) # apply Hough Line Transformation lines = cv2.HoughLinesP(thresh, 1, np.pi/180, 30, maxLineGap=200) dmy = img.copy() # Plot detected lines try: for line in lines: x1, y1, x2, y2 = line[0] cv2.line(dmy, (x1, y1), (x2, y2), (255, 0, 0), 3) cv2.imwrite('detected/'+str(cnt)+'.png',dmy) except TypeError: cv2.imwrite('detected/'+str(cnt)+'.png',img) cnt+= 1
视频预处理
# input frames pathpathIn= 'detected/'# output path to save the videopathOut = 'roads_v2.mp4'# specify frames per secondfps = 30.0from os.path import isfile, join# get file names of the framesfiles = [f for f in os.listdir(pathIn) if isfile(join(pathIn, f))]files.sort(key=lambda f: int(re.sub('D', '', f)))
接下来,我们将所有包含检测到的车道的帧放入列表中:
frame_list = []for i in tqdm_notebook(range(len(files))): filename=pathIn + files[i] #reading each files img = cv2.imread(filename) height, width, layers = img.shape size = (width,height) #inserting the frames into an image array frame_list.append(img)
最后,我们现在可以使用以下代码将帧组合成视频:
# write the videoout = cv2.VideoWriter(pathOut,cv2.VideoWriter_fourcc(*'DIVX'), fps, size)for i in range(len(frame_array)): # writing to a image array out.write(frame_array[i])out.release()
搞定!这就是你的Python车道检测系统。
在本教程中,我们介绍了一种简单的车道检测技术。我们没有使用任何模型或复杂的图像功能。相反,我们的解决方案仅基于某些图像预处理操作。
但是,在许多情况下,此解决方案将不起作用。例如,当没有车道标记或道路上的交通过多时,该系统将发生故障。在车道检测中有更复杂的方法可以克服此类问题。如果你对自动驾驶汽车的概念感兴趣,我希望你继续探索这个话题。
原文标题:
Hands-On Tutorial on Real-Time Lane Detection using OpenCV (Self-Driving Car Project!)
原文链接:
https://www.analyticsvidhya.com/blog/2020/05/tutorial-real-time-lane-detection-opencv/
编辑:于腾凯
校对:吕艳芹
译者简介

张若楠,UIUC统计研究生毕业,南加州传媒行业data scientist。曾实习于国内外商业银行,互联网,零售行业以及食品公司,喜欢接触不同领域的数据分析与应用案例,对数据科学产品研发有很大热情。